- Что такое электродвигатель?
- Как определить мощность?
- По габаритным размерам
- По диаметру вала
- По показанию счетчика
- Работа и мощность
- Потребляемая мощность электродвигателя
- Нагрузка насосов и типы нагрузки электродвигателя
- Соответствие электродвигателя нагрузке
- Время пуска электрдвигателя
- Число пусков электродвигателя в час
- Конструкция электрического двигателя
- Принцип действия
- Виды электродвигателей
- Общие характеристики двигателей
- Вращательный момент
- Мощность двигателя
- Коэффициент полезного действия электромотора
- Номинальное количество оборотов
- Момент инерции
- Расчетное напряжение
- Электрическая константа времени
- Основные формулы расчета мощности двигателей
Что такое электродвигатель?
Электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Работа большинства устройств зависит от взаимодействия магнитного поля с обмоткой ротора, выражающегося во вращении. Они работают от постоянного или переменного тока.
Источником питания может быть батарея, инвертор или розетка. В некоторых случаях двигатель работает в обратном направлении, то есть преобразует механическую энергию в электрическую. Такие установки широко используются в электростанциях, работающих на воздушном или водяном потоке.
Электродвигатели классифицируют по типу источника питания, внутреннему устройству, области применения и мощности. Преобразователи частоты переменного тока также могут иметь специальные щетки. Они работают от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности двигателя переменного тока
Р = U х I,
где P — мощность, U — напряжение, I — ток.
Общие приводные агрегаты с размерами и характеристиками используются в промышленности. Самые большие двигатели мощностью более 100 МВт используются в силовых установках судов, компрессорных и насосных станциях. Меньшие размеры используются в бытовой технике, такой как пылесос или вентилятор.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметр вала, размер и длина, сила тока и сопротивление, измерение амперметром.
По габаритным размерам
Все электродвигатели отличаются габаритными размерами. Определить мощность двигателя можно, сравнив габаритные размеры с таблицей для определения мощности электродвигателя, перейдя по ссылке габаритные и подключив габариты электродвигателей АИР.
Какие размеры необходимо измерить:
- Длина, ширина, высота тела
- Расстояние от центра шахты до пола
- Длина и диаметр вала
- Установочные размеры для лап (фланец)
По диаметру вала
определение мощности электродвигателя по диаметру вала – частый запрос поисковиков. Но мало точно определить этот параметр — два двигателя одного размера, с одинаковыми валами и частотой вращения могут иметь разную мощность.
Таблица зависимости диаметра вала от мощности и числа оборотов для двигателей AIR и 4AM.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Перейти к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 144 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90ЛА8 | |
| 1.1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2.2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90Л2, АИР100С4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100С2, АИР100Л4, АИР112МВ6, АИР132С8 | |
| 5,5 | 32 | 38 | АИР100Л2, АИР112М4, АИР132С6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112М2, АИР132С4, АИР132М6, АИР160С8 | |
| 11 | 38 | 48 | АИР132М2, АИР132М4, АИР160С6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160С2, АИР160С4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160М2, АИР160М4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180С2, АИР180С4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180М2, АИР180М4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200М2, АИР200М4, АИР225М6, АИР250С8 |
| 45 | 75 | 75 | АИР200Л2, АИР200Л4, АИР250С6, АИР250М8 | ||
| 55 | 65 | 80 | АИР225М2, АИР225М4, АИР250М6, АИР280С8 | ||
| 75 | 65 | 75 | 80 | АИР250С2, АИР250С4, АИР280С6, АИР280М8 | |
| 90 | 90 | АИР250М2, АИР250М4, АИР280М6, АИР315С8 | |||
| 110 | 70 | 80 | 90 | АИР280С2, АИР280С4, АИР315С6, АИР315М8 | |
| 132 | одна сотня | АИР280М2, АИР280М4, АИР315М6, АИР355С8 | |||
| 160 | 75 | 90 | одна сотня | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315М2, АИР315М4, АИР355М6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355М2, АИР355М4 |
По показанию счетчика
Обычно показания счетчика отображаются в киловаттах (далее – кВт). Для точности измерения выключите все электроприборы или используйте переносной счетчик. Мощность электродвигателя составляет 2,2 кВт, а это значит, что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показаниям счетчика необходимо:
- Подключите двигатель и дайте ему поработать 6 минут.
- Умножаем показания счетчика на 10 – получаем точную мощность электродвигателя.
Работа и мощность
Остановимся теперь на таком понятии, как «работа», которое в данном контексте имеет особое значение. Работа совершается, когда сила — любая сила — вызывает движение. Работа равна произведению силы на расстояние. Для линейного движения сила выражается как работа, совершаемая в данный момент времени.
Если мы говорим о вращении, сила выражается как крутящий момент (T), умноженный на скорость вращения (w).
Скорость вращения объекта определяется путем измерения времени, за которое данная точка на вращающемся объекте совершает один полный оборот. Обычно это значение выражается в оборотах в минуту, т.е мин-1 или об/мин. Например, если объект делает 10 полных оборотов в минуту, это означает, что скорость вращения равна: 10 мин-1 или 10 об/мин.
Так скорость вращения измеряется в оборотах в минуту, т.е мин-1.
Для наглядности возьмем разные электродвигатели, чтобы более подробно проанализировать взаимосвязь между мощностью, крутящим моментом и скоростью. Хотя крутящий момент и скорость электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас есть 2-полюсный двигатель (3000 об/мин) и 4-полюсный двигатель (1500 об/мин). Мощность обоих электродвигателей составляет 3,0 кВт, но их крутящие моменты различаются.
Таким образом, крутящий момент 4-полюсного двигателя в два раза больше, чем у двухполюсного двигателя той же мощности.
Как генерируются крутящий момент и скорость?
Теперь, когда мы рассмотрели основы крутящего момента и скорости вращения, давайте посмотрим, как они создаются.
В двигателях переменного тока крутящий момент и скорость генерируются взаимодействием между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных условиях эксплуатации скорость ротора всегда соответствует магнитному полю.
Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него, создавая вращающий момент. Разность скоростей вращения ротора и статора, измеряемая в %, называется скоростью скольжения.
Скольжение – основной параметр электродвигателя, характеризующий его режим работы и нагрузку. Чем большую нагрузку должен выдерживать двигатель, тем больше проскальзывание.
С учетом сказанного выше, давайте проанализируем еще несколько формул. Крутящий момент асинхронного двигателя зависит от напряженности магнитных полей ротора и статора, а также от соотношения фаз между этими полями. Эта связь показана в следующей формуле:
Сила магнитного поля зависит в первую очередь от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Коэффициент крутящего момента пропорционален квадрату коэффициента напряжения, т е если приложенное напряжение падает на 2 %, крутящий момент уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подключен электродвигатель, а магнитное поле частично создается напряжением. Входную мощность можно рассчитать, если известны данные о питании двигателя, т е напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на оси обычно измеряется в киловаттах. В США мощность на оси измеряется в лошадиных силах (л.с.).
Если вам нужно перевести лошадиные силы в киловатты, умножьте соответствующее значение (в лошадиных силах) на 0,746. Например, 20 л.с соответствует (20 * 0,746) = 14,92 кВт.
И наоборот, киловатты можно преобразовать в лошадиные силы, умножив значение киловатта на 1,341. Это означает, что 15 кВт соответствует 20,11 л.с.
Нагрузка насосов и типы нагрузки электродвигателя
Различают следующие виды нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определенных типов нагрузки, которые требуют меньшего крутящего момента при увеличении скорости, и наоборот. В металлообработке обычно применяют нагрузки с постоянной силой, такие как сверление, прокатка и др.
Как следует из названия — «постоянный крутящий момент» — подразумевается, что величина крутящего момента, необходимая для привода механизма, постоянна, независимо от скорости вращения. Конвейерные ленты являются примером такого режима работы.
«Переменный крутящий момент» — эта категория представляет для нас наибольший интерес. Этот крутящий момент актуален для нагрузок, требующих низкого крутящего момента при низких оборотах, а по мере увеличения оборотов требуется более высокий крутящий момент. Типичным примером являются центробежные насосы.
Остальная часть этого раздела будет посвящена исключительно переменному крутящему моменту и мощности.
Установив, что переменный крутящий момент характерен для центробежных насосов, нам необходимо проанализировать и оценить некоторые характеристики центробежного насоса. Использование преобразователей частоты регулируется особыми законами физики. В данном случае это законы подобия, описывающие взаимосвязь между перепадами давления и расходами.
Во-первых, подача насоса прямо пропорциональна скорости. Это означает, что если насос работает на 25% более высокой скорости, ток увеличится на 25%.
Во-вторых, напор насоса будет изменяться пропорционально квадрату изменения скорости вращения. Если скорость увеличить на 25%, давление увеличится на 56%.
В-третьих, и это самое интересное, сила пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая скорость снижается на 50%, это соответствует снижению потребляемой мощности на 87,5.
Таким образом, законы масштабирования объясняют, почему приводы с регулируемой скоростью больше подходят для приложений, требующих переменного расхода и давления. Grundfos предлагает ряд двигателей со встроенным преобразователем частоты, который регулирует скорость именно для этого.
Точно так же, как расход, давление и мощность, требуемый крутящий момент зависит от скорости вращения.
На рисунке показан разрез центробежного насоса. Требования к крутящему моменту для этого типа нагрузки почти противоположны требованиям для «постоянной мощности». Для нагрузок с переменным крутящим моментом требуемый крутящий момент на низкой скорости мал, а требуемый крутящий момент на высокой скорости велик.
Говоря математическим языком, крутящий момент пропорционален квадрату скорости вращения, а сила пропорциональна кубу скорости вращения.
Это можно проиллюстрировать, используя характеристику крутящий момент/скорость, которую мы использовали ранее, говоря о крутящем моменте двигателя:
Когда двигатель увеличивает скорость от нуля до номинальной скорости, крутящий момент может значительно измениться. Величина крутящего момента, необходимого для данной нагрузки, также зависит от скорости. Чтобы двигатель подходил для данной нагрузки, необходимо, чтобы крутящий момент двигателя всегда превышал крутящий момент, требуемый для данной нагрузки.
В примере центробежный насос с номинальной нагрузкой имеет крутящий момент 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В этом случае насосу при пуске требуется 20 % крутящего момента при номинальной нагрузке, т.е ок. 14 Нм. После пуска крутящий момент немного снижается, а когда насос набирает обороты, увеличивается до полной нагрузки.
Конечно, нам нужен насос, который будет обеспечивать требуемые значения расхода/напора (Q/H). Это означает, что нельзя допускать остановки двигателя, а двигатель должен постоянно разгоняться, пока не достигнет номинальной скорости.
Поэтому необходимо, чтобы характеристика крутящего момента соответствовала или превышала нагрузочную характеристику во всем диапазоне от 0 % до 100 % скорости вращения. Любой «избыточный» момент, т е разница между кривой нагрузки и кривой двигателя, используется как ускорение вращения.
Читайте также: Мощность чайника: значение мощности электрочайника в кВт, сколько энергии потребляет прибор
Соответствие электродвигателя нагрузке
Если вам нужно определить, соответствует ли крутящий момент конкретного двигателя требованиям нагрузки, вы можете сравнить характеристику скорости/момента двигателя с характеристикой скорости/момента нагрузки. Крутящий момент, создаваемый двигателем, должен превышать требуемый крутящий момент нагрузки, включая периоды полного разгона и вращения.
Характеристика зависимости крутящего момента от частоты вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику, то увидим, что при разгоне двигатель запускается при токе, эквивалентном 550% тока полной нагрузки.
Когда скорость двигателя приближается к номинальной, ток уменьшается. Как и следовало ожидать, в течение начального периода пуска потери двигателя высоки, поэтому этот период не должен быть длительным, чтобы предотвратить перегрев.
Очень важно, чтобы максимальная скорость вращения достигалась максимально точно. Это связано с энергопотреблением: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к увеличению энергопотребления на 3.
Потребляемая мощность пропорциональна диаметру рабочего колеса в четвертой степени.
Уменьшение диаметра рабочего колеса на 10 % приводит к снижению потребляемой мощности на (1-(0,9*0,9*0,9*0,9))*100=34 %, что равно 66 % номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам нужно подобрать электродвигатель для определенной нагрузки, например, для центробежных насосов, наша главная задача — обеспечить правильный крутящий момент и мощность в номинальной рабочей точке, поскольку пусковой крутящий момент центробежных насосов довольно низкий. Время пуска довольно ограничено, так как крутящий момент довольно высок.
Нередко сложные системы защиты и управления двигателем требуют некоторого времени для запуска, чтобы они могли измерить пусковой ток двигателя. Время запуска двигателя и насоса рассчитывается по следующей формуле:
tstart = время, необходимое двигателю насоса для достижения полной нагрузки
n = частота вращения двигателя при полной нагрузке
Itot = инерция, требующая ускорения, т е инерция вала двигателя, ротора, вала насоса и рабочих колес.
Момент инерции для насосов и двигателей можно найти в соответствующих технических данных.
Mizb = избыточный крутящий момент, ускоряющий вращение. Избыточный крутящий момент равен крутящему моменту двигателя за вычетом крутящего момента насоса при различных скоростях.
Как видно из приведенных выше расчетов, проведенных для данного примера с электродвигателем мощностью 4 кВт для насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления двигателем могут контролировать количество пусков в час для данного насоса и двигателя. Необходимость контроля этого параметра заключается в том, что каждый раз при пуске и последующем разгоне двигателя происходит большое потребление пускового тока.
Пусковой ток нагревает двигатель. Если двигатель не охлаждается, непрерывная нагрузка пусковым током будет значительно нагревать обмотки статора двигателя, что приведет к отказу двигателя или сокращению срока службы изоляции.
Обычно поставщик двигателя несет ответственность за количество запусков двигателя в час. Например, Grundfos указывает максимальное количество пусков в час в паспорте насоса, поскольку максимальное количество пусков зависит от момента инерции насоса.
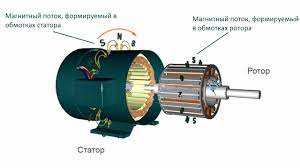
Конструкция электрического двигателя
В состав привода входят:
- Ротор.
- Статор.
- Шарикоподшипники.
- Воздушные пространства.
- Обмотка.
- Выключатель.
Ротор — единственная подвижная часть привода, которая вращается вокруг своей оси. Ток, проходящий по проводникам, создает индуктивное возмущение в обмотке. Генерируемое магнитное поле взаимодействует с постоянными магнитами статора, которые приводят в движение вал.
Их рассчитывают по формуле мощности электродвигателя по току, за которую берутся КПД и коэффициент мощности, включая все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют выносной.
Статор является неподвижным элементом в электромагнитной цепи двигателя. Может включать обмотку магнитов или постоянных магнитов. Сердечник статора изготовлен из тонких металлических листов, которые называются пакетом якоря. Он предназначен для уменьшения потерь энергии, что часто происходит с цельными стержнями.
Воздушный зазор — расстояние между ротором и статором. Небольшой зазор эффективен, так как влияет на низкий коэффициент работы электродвигателя. Ток намагничивания увеличивается с размером зазора. Поэтому всегда стараются делать это минимально, но в разумных пределах. Слишком маленькое расстояние приводит к трению и расшатыванию фиксирующих элементов.
Обмотка состоит из медного провода, собранного в катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока по проводам обмотки. В этот момент устройство входит в режим явной и неявной конфигурации полюсов.
В первом случае магнитное поле установки создает обмотку вокруг полюсного наконечника. Во втором случае пазы полюсного наконечника ротора разбросаны в распределенном поле. Двигатель с экранированными полюсами имеет обмотки, содержащие магнитные помехи.
Переключатель используется для изменения входного напряжения. Он состоит из контактных колец, размещенных на валу и изолированных друг от друга. На контактные щетки поворотного коммутатора подается ток якоря, что вызывает изменение полярности и заставляет ротор вращаться от полюса к полюсу.
Если напряжения нет, двигатель перестает вращаться. Современные установки оснащены дополнительными электронными средствами, контролирующими процесс вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника сделать металлический каркас и поставить его в поле под углом 90°, то на края будут действовать силы, направленные в противоположную сторону друг относительно друга. Они создают крутящий момент вокруг оси, который начинает ее вращать.
Катушки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, петлевой ток создает индукционное поле в обмотке электромагнита, которое создает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают на переменном токе со скоростью якоря, не равной пульсации магнитного поля. Поэтому их еще называют индуктивными. Ротор приводится в движение за счет взаимодействия между электрическим током в катушках и магнитным полем.
При отсутствии напряжения во вспомогательной обмотке устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, в помещении образуется постоянное магнитное поле с пульсацией +F и -F. Его можно представить в виде следующей формулы:
nпр = nоб = f1 × 60 ÷ p = n1
куда:
nпр — число оборотов, которые делает магнитное поле в прямом направлении, об/мин;
nоб — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсаций электрического тока, Гц;
p — количество полюсов;
n1 – общее количество оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает первое движение. Из-за неравномерного воздействия тока он будет развивать крутящий момент. По закону индукции в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток.
Частота пропорциональна скольжению ротора. За счет взаимодействия электрического тока и магнитного поля создается крутящий момент на валу.
Для расчета производительности есть три формулы мощности асинхронного двигателя. В случае изменения фазы используйте
S = P ÷ cos (альфа), где:
S — полная мощность, измеряемая в вольт-амперах.
P — активная мощность, выраженная в ваттах.
альфа — фазовый сдвиг.
Под полной мощностью понимается реальный показатель, а под активной мощностью расчетный.
Виды электродвигателей
По источнику питания станции делятся на работающие от:
- Постоянный ток.
- Переменный ток.
По принципу действия они, в свою очередь, делятся на:
- Коллектор.
- Клапан.
- Асинхронный.
- Синхронный.
Вентильные двигатели не относятся к отдельному классу, так как их устройство представляет собой вариант работы коллектора. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно они интегрированы вместе с панелью управления. За их счет происходит согласованный обмен якоря.
Синхронные и асинхронные двигатели работают исключительно на переменном токе. Вращение контролируется сложной электроникой. Асинхронные делятся на:
- Трехфазный.
- Двухфазный.
- Простая фаза.
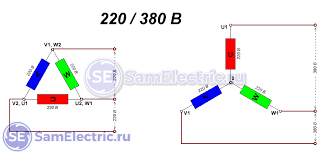
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольник
P = 3*Uф*Iф*cos(альфа).
Однако для линейных значений напряжения и тока это выглядит как
P = 1,73 × Up × If × cos(альфа).
Это будет реальным показателем того, какую мощность двигатель берет из сети.
Синхронные делятся на:
- Степпер.
- Гибридный.
- Индуктор.
- Гистерезис.
- Реактивный.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не выделяют в отдельную категорию. Работой механизмов управляют с помощью частотных преобразователей. Существуют также универсальные двигатели, работающие на постоянном и переменном токе.
Общие характеристики двигателей
Все двигатели имеют общие параметры, которые используются в формуле для определения мощности электродвигателя. На их основе можно рассчитать характеристики машины. В разной литературе они могут называться по-разному, но обозначают одно и то же. В список таких параметров входят:
- Крутящий момент.
- Мощность двигателя.
- Эффективность.
- Номинальное число оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая постоянная времени.
Вышеуказанные параметры необходимы, прежде всего, для определения КПД электроустановок, приводимых в действие механической мощностью двигателей. Расчетные значения дают лишь приблизительное представление о реальных свойствах продукта. Однако эти показатели часто используются в формуле мощности электродвигателя. Именно она определяет КПД машин.
Вращательный момент
У этого термина есть несколько синонимов: силовой момент, момент двигателя, крутящий момент, крутящий момент. Все они используются для обозначения индикатора, хотя эти понятия не всегда идентичны с точки зрения физики.
В целях унификации терминологии разработаны стандарты, сводящие все в одну систему. Поэтому в технической документации всегда используется термин «крутящий момент». Это векторная физическая величина, равная произведению векторных значений силы и радиуса. Радиус-вектор проведен от оси вращения к точке приложения силы.
С точки зрения физики разница между крутящим моментом и крутящим моментом заключается в точке приложения силы. В первом случае это внутреннее усилие, во втором — внешнее. Значение измеряется в ньютон-метрах. Однако в формуле мощности двигателя в качестве основной величины используется крутящий момент.
Он рассчитывается как
М = F × г, где:
М — крутящий момент, Нм;
F — приложенная сила, Н;
r — радиус, м.
Для расчета номинального крутящего момента привода используйте формулу
Мном = 30Рном ÷ пи × ном, где:
Рном — номинальная мощность электродвигателя, Вт;
ном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя должна выглядеть так:
Рном = Мном * пи * ном / 30.
Обычно все свойства указываются в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берутся данные их аналогов.
При этом всегда известны только номинальные свойства, которые приведены в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле этот параметр представляет собой скалярную физическую величину, которая выражается в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм совершит за определенную единицу времени.
В электротехнике характеристика показывает полезное механическое усилие на центральном валу. Для обозначения показателя используется буква Р или W. Основная единица измерения – Ватт. Общую формулу расчета мощности электродвигателя можно представить в виде:
P = dA ÷ dt, где:
А — механическая (полезная) работа (энергия), Дж;
t — прошедшее время, сек.
Механическая работа также является скалярной физической величиной, выражающейся действием силы на предмет и зависящей от направления и перемещения этого предмета. Это произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Он выражает расстояние, которое пройдет точка приложения силы. Для вращательных движений это выражается как:
ds = r × d(тета), где:
ta — угол поворота, рад.
Таким образом, можно рассчитать угловую частоту вращения ротора:
омега = d(тета) ÷ dt.
Из него следует формула мощности электродвигателя на валу: Р = М × омега.
Коэффициент полезного действия электромотора
КПД – это свойство, отражающее КПД системы при преобразовании энергии в механическую энергию. Он выражается как отношение между полезной энергией и используемой энергией. По единой системе единиц измерения она обозначается как «эта» и представляет собой безразмерную величину, исчисляемую в процентах. Формула КПД электродвигателя по мощности:
эта = P2 ÷ P1, где:
P1 — электрическая (подводящая) мощность, Вт;
Р2 — полезная (механическая) мощность, Вт;
Это также может быть выражено как:
эта = A ÷ Q × 100%, где:
А — полезная работа, Дж;
Q — используемая энергия, Дж.
Чаще коэффициент рассчитывается по формуле потребляемой мощности электродвигателя, так как эти показатели всегда проще измерить.
Снижение КПД электродвигателя происходит за счет:
- Электрические потери. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитные потери. Из-за чрезмерного намагничивания сердечника возникают гистерезисные и вихревые токи, что важно учитывать в формуле мощности двигателя.
- Механические потери. Они связаны с трением и вентиляцией.
- Дальнейшая потеря. Они появляются из-за гармоник в магнитном поле, так как статор и ротор зубчатые. Также в обмотке находится высшая гармоника магнитодвижущей силы.
Следует отметить, что КПД является одной из важнейших составляющих формулы расчета мощности электродвигателя, так как позволяет получить цифры, более близкие к реальности. В среднем это число колеблется от 10% до 99%. Это зависит от конструкции механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических свойств двигателя является частота вращения вала. Выражается в оборотах в минуту. Часто он используется в формуле мощности двигателя насоса для определения производительности.
Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет собой физическую величину, равную количеству полных оборотов за определенный период времени.
Формула расчета оборотов:
n = 30 × омега ÷ пи, где:
n — частота вращения двигателя, об/мин.
Чтобы найти мощность электродвигателя по формуле частоты вращения вала, необходимо привести ее к расчету угловой скорости. Таким образом, P = M × omega будет выглядеть так:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
т = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, отражающую меру инерции вращательного движения вокруг собственной оси. В этом случае масса тела есть величина его инерции при поступательном движении.
Основная характеристика параметра выражается распределением масс тела, которое равно сумме произведений квадрата расстояния от оси до базовой точки и массы объекта. В международной системе единиц измерения он обозначается как кг м2 и рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны соотношением:
M — J × эпсилон, где
эпсилон — угловое ускорение, с-2.
Индикатор рассчитывается как:
эпсилон = d(омега) × dt.
Зная массу и радиус ротора, можно рассчитать рабочие параметры механизмов. Формула мощности двигателя включает в себя все эти свойства.
Расчетное напряжение
Его еще называют именным. Оно представляет собой базовое напряжение, представленное стандартным набором напряжений, который определяется степенью изоляции электрооборудования и сети.
В действительности она может варьироваться в разных точках оборудования, но не должна превышать максимально допустимые режимы работы, рассчитанные на непрерывную работу механизмов.
Для обычных установок под номинальным напряжением понимаются расчетные значения, указанные разработчиком при нормальной эксплуатации. Перечень стандартных напряжений сети приведен в ГОСТ. Эти параметры всегда описываются в технических характеристиках механизмов. Для расчета производительности используйте формулу мощности электродвигателя по току:
П = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после активации обмоток привода. Параметр обусловлен переходными процессами с электромеханическими свойствами, так как они непостоянны из-за большого активного сопротивления. Общая формула для расчета постоянной времени:
чай = L ÷ R.
Однако электромеханическая постоянная времени tm всегда больше, чем электромагнитная постоянная времени te. Первый параметр получается из уравнения динамической характеристики двигателя при сохранении условия, когда ротор разгоняется от нулевой скорости до максимальной частоты холостого хода. В этом случае уравнение принимает вид
M = Mst + J × (d(omega) ÷ dt), где
Мст = 0.
Отсюда получаем формулу:
M = J × (d(омега) ÷ dt).
Фактически электромеханическая постоянная времени рассчитывается от пускового момента — Mp. Механизм, работающий в идеальных условиях с прямолинейными свойствами, имел бы формулу:
M = Mp × (1 — omega ÷ omega0), где
омега0 — холостой ход.
Такие расчеты используются в формуле мощности двигателя насоса, когда ход поршня напрямую зависит от скорости вращения вала.
Основные формулы расчета мощности двигателей
Для расчета реальных характеристик механизмов всегда нужно учитывать множество параметров, в первую очередь нужно знать, какой ток подается на обмотки двигателя: постоянный или переменный. Принцип их работы разный, поэтому и метод расчета разный. Если упрощенное отображение расчета движущей силы выглядит так:
Пел = U × I, где
I — сила тока, А;
U — напряжение, В;
Рельс — отпущенная электроэнергия Вт
В формуле мощности двигателя переменного тока также необходимо учитывать фазовый сдвиг (альфа). Соответственно расчеты для асинхронного привода выглядят так:
Pel = U × I × cos (альфа).
Помимо активного (питающего) тока, есть еще:
- S — реактивный, ВА. S = P ÷ cos (альфа).
- Q — полный, В.А. Q = I × U × грех (альфа).
В расчетах также необходимо учитывать тепловые и индуктивные потери, а также трение. Поэтому упрощенная модель формулы для двигателя постоянного тока выглядит так:
Pel = Pmech + Rtep + Rind + Rtr, где
Рмэх — полезная вырабатываемая мощность, Вт;
Rтеп — потери на тепловыделение, Вт;
Rind — затраты на зарядку в индукционной катушке, Вт;
RT — потери на трение, Вт.