- Общие сведения
- Короткозамкнутый и фазный роторы
- Конструктивные особенности
- Методы настройки оборотов
- Назначение
- Принцип работы
- Виды и критерии выбора
- Устройство на тиристорах
- Транзисторный тип
- Регулирование за счет частоты
- Изготовление своими руками
- Как выбрать?
- Подключение
- Простейший вариант
- В цепи якоря
- Для низкого напряжения
- От сети
- Коллекторные машины
- Двухфазный двигатель
- Обычные асинхронники
- Выбираем устройство
- Прибор триак
- Преобразователи на электронных ключах
- Процесс пропорциональных сигналов
- Измерения
Общие сведения
Двигатели переменного тока широко используются во многих сферах жизни человека, а именно модели асинхронного типа. Основным назначением двигателя как электрической машины является преобразование электрической энергии в механическую.
Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. По типу источника питания асинхронные двигатели бывают двух типов:
- Простая фаза.
- Трехфазный.
Однофазные используются для бытовых нужд, а трехфазные – на производстве. В трехфазных асинхронных двигателях (далее ТИМ) используются два типа роторов:
- закрыть;
- фаза.
Двигатели с замкнутым контуром составляют около 95% всех используемых двигателей и имеют значительную мощность (от 250 Вт и выше). Фазовый тип структурно отличается от АД, но используется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая размещена внутри статора, а на поверхность запрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и закороченные на концах двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые (для машин меньшей мощности) стержни играют роль электромагнитов с полюсами, обращенными к статору . Стержни обмотки не имеют изоляции, так как напряжение в такой обмотке равно нулю.
Алюминий, чаще используемый для сердечников двигателей средней мощности, характеризуется низкой плотностью и высокой электропроводностью.
Для снижения высших гармоник электродвижущей силы (ЭДС) и устранения пульсаций магнитного поля стержни ротора имеют определенный расчетный угол наклона по отношению к оси вращения. Если используется маломощный электродвигатель, пазы представляют собой закрытые конструкции, отделяющие ротор от зазора для увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуется обмоткой, концы которой соединены по типу «звезды» и закреплены на контактных кольцах (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрыта оксидной пленкой.
Кроме того, в цепь обмотки ротора добавлен резистор, позволяющий изменять активное сопротивление (R) цепи ротора для уменьшения пусковых токов (Ip). Пусковые токи отрицательно влияют на электрическую и механическую части электродвигателя. Переменные резисторы, используемые для регулирования Ip:
- Металлические или ступени с ручным переключением.
- Жидкость (за счет погружения на глубину электродов).
Графитовые щетки изнашиваются, а некоторые модели оснащены беличьей клеткой, которая поднимает щетки и замыкает кольца после запуска двигателя. АД с фазным ротором более гибкие в плане регулирования Ip.
Конструктивные особенности
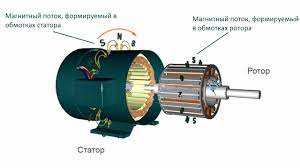
Асинхронный двигатель не имеет ярко выраженных полюсов, в отличие от электродвигателя постоянного тока. Число полюсов определяется количеством витков в обмотках неподвижной части (статора) и способом соединения.
В асинхронной машине с 4 катушками проходит магнитный поток. Статор выполнен из пластин специальной стали (электротехнической стали), сводящей к нулю вихревые токи, где происходит значительный нагрев обмоток. Это приводит к массивному межвитковому замыканию.
Железо или сердечник ротора напрессованы непосредственно на вал. Между ротором и статором имеется минимальный воздушный зазор. Обмотка ротора выполнена в виде «беличьей клетки» и выполнена из медных или алюминиевых стержней.
В электродвигателях мощностью до 100 кВт используется алюминий, имеющий малую плотность – для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы принудительного охлаждения, которые крепятся на валу. Эти двигатели просты и надежны.
Однако при пуске двигатели потребляют большой ток, в 7 раз превышающий номинальный ток. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества уходит на нагрев обмоток.
Электродвигатели, имеющие повышенный пусковой момент, отличаются от обычных асинхронных конструкцией ротора. Ротор выполнен в виде двойной «беличьей клетки». Эти модели аналогичны типам фаз для производства роторов.
Он состоит из внутренней и внешней «беличьи клетки», внешняя — та, которая запускается и имеет большое активное и малое реактивное R. Наружная — малая активная и большая реактивная R. С увеличением скорости вращения I переключиться на внутреннюю клетку и работает как ротор с короткозамкнутым ротором.
Методы настройки оборотов
Для предотвращения негативного воздействия при пуске необходимо снизить скорость вращения электродвигателя 220 В или 380 В. Добиться этой цели можно несколькими способами:
- Изменение значения R цепи ротора.
- Измените U в обмотке статора.
- Изменение частоты U.
- Поменять полюса.
При изменении R-величины роторной части с помощью дополнительных резисторов это приводит к уменьшению скорости вращения, но в результате снижается мощность. Следовательно, есть значительные потери электроэнергии. Этот тип регулирования следует использовать для фазного ротора.
Изменяя значения U на обмотке статора, возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. При использовании этого метода его можно использовать только с нагрузкой типа вентилятора (например, регулятор скорости вращения вентилятора 220 В).
Для всех остальных случаев используются трехфазные автоматические трансформаторы, позволяющие плавно изменять номиналы U или тиристорные регуляторы.
На основании формулы зависимости скорости вращения от частоты питающей сети U можно управлять числом оборотов ротора. Частота вращающегося магнитного поля статора рассчитывается по формуле: Nст = 60*f/p (f — частота сетевого тока, p — число пар полюсов). Этот метод позволяет плавно регулировать скорость вращения роторной части.
Для достижения высокого КПД нужно изменить частоту и U. Этот способ оптимален для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статоре (в пазах) нужно поставить 2 обмотки с разным номером р.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого способа является сохранение ступенчатого характера изменения частоты электродвигателя с короткозамкнутым ротором.
Назначение
Технически регулятор частоты вращения двигателя предназначен для изменения количества оборотов вала в единицу времени. В фазе разгона регулировка частоты обеспечивает более плавный ход работы, меньшие токи и т д. В некоторых технологических процессах необходимо снизить скорость работы оборудования регулятором скорости, изменить подачу или впрыск сырья и т д
Но на практике этот вариант может служить и другим целям:
- Экономит энергозатраты – позволяет снизить потери при пуске и остановке вращения двигателя, переключении скоростей или регулировке тяги. Особенно это актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурных режимов, значений давления без установления обратной связи с рабочим органом или с ним в асинхронных электродвигателях.
- Плавный пуск — предотвращает скачки напряжения в момент включения, особенно актуально для асинхронных двигателей с большой нагрузкой на валу. Это приводит к значительному снижению токовых нагрузок на сеть и исключает ложные срабатывания средств защиты.
- Поддерживать скорость трехфазных электродвигателей на необходимом уровне. Фактически для точных технологических операций, где качество производства из-за колебаний питающего напряжения может быть нарушено или на вал действует другая сила.
- Регулировка скорости двигателя от 0 до максимальной или от другой базовой скорости.
- Обеспечьте достаточный крутящий момент на малых скоростях электрической машины.
Возможность реализации тех или иных функций в регуляторах скорости определяет как принцип их работы, так и схемное исполнение.
Принцип работы
Для регулировки скорости может быть использован метод понижения или повышения напряжения, изменения силы и частоты тока, подаваемого на обмотки асинхронных и коллекторных электродвигателей. Поэтому далее будем рассматривать альтернативы преобразователям частоты и регуляторам напряжения.
Среди используемых в производственной и бытовой сферах стоит выделить:
- Введение рабочего сопротивления — осуществляется с помощью переменных резисторов, делителей и других преобразователей. Он обеспечивает хорошее снижение однофазных двигателей за счет контроля скольжения (разность между магнитным полем статора и частотой вращения асинхронных агрегатов). Для этого были установлены электродвигатели большей мощности, чтобы их можно было питать меньшим напряжением. Соотношение по скорости будет до 2 раз ниже.
- Автотрансформаторный – выполняется перемещением подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимуществом этого принципа является четкая синусоида переменного тока и большая перегрузочная способность.
- Тиристорный или симисторный — изменяет величину питающего напряжения за счет пары встречно-параллельных тиристоров или шунтирующего соединения с симистором. Этот метод применяется не только в асинхронных двигателях, но и в других бытовых приборах — диммерах, выключателях и т д
Как видно на схеме, напряжение того же асинхронного однофазного электродвигателя проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора Т1. Перемещая ручку тиристорного регулятора R1, мы также изменяем скорость вращения однофазного электродвигателя.
- Транзистор – позволяет изменять форму приложенного напряжения путем преобразования количества импульсов и временного промежутка между приложенным напряжением. Из-за чего он получил название широтно-импульсной модуляции, пример такого регулятора показан на схеме ниже.
Здесь однофазный асинхронный двигатель заводится от сети 220В через выпрямительный блок VD1-4, затем напряжение подается на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, они регулируют скорость двигателя.
- Частотный — преобразует частоту приложенного напряжения к обмоткам однофазного или трехфазного асинхронного электродвигателя. Это самый современный метод, ранее он считался дорогим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров стал самым эффективным. Его можно реализовать с помощью транзисторов, микросхем или микроконтроллеров, которые могут уменьшать или увеличивать частоту ШИМ.
- Полюс — позволяет регулировать скорость вращения электродвигателя при изменении числа витков в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Он реализуется как путем намотки нескольких катушек на каждую из фаз, так и путем одновременного соединения катушек последовательно или параллельно, этот принцип показан на рисунке ниже.
Виды и критерии выбора
Чтобы выбрать регулятор, нужно ориентироваться на определенные характеристики для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для коллекторных двигателей применяют регуляторы с векторной или скалярной системой управления.
- Мощность – главный параметр, на который нужно опираться.
- Группа U.
- По частотному диапазону. Необходимо подобрать модель, отвечающую требованиям пользователя для конкретного случая.
- Прочие характеристики, куда входит гарантия, габариты, комплектация.
Кроме того, регулятор выбирается мощнее самого электродвигателя по формуле: Prereg = 1,3 * Pmotor (Prereg, Pmotor — мощность регулятора и двигателя соответственно). Его нужно выбирать для разных U-диапазонов, так как немаловажную роль играет универсальность.
Устройство на тиристорах
В этой модели, показанной на схеме 1, используются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить симистором.
Эта схема регулирует открыванием или закрыванием тиристоров (симисторов) при фазовом переходе через нейтраль. Для правильного управления коллекторным двигателем используются следующие методы модификации схемы 1:
- Монтаж защитных цепей LRC, состоящих из конденсаторов, резисторов и дросселей.
- Добавляет емкость на входе.
- Применение тиристоров или симисторов, ток которых превышает номинальное значение тока двигателя в пределах от 3..8 раз.
Этот тип регулятора имеет свои преимущества и недостатки. К первым можно отнести невысокую цену, малый вес и габариты. Второй должен содержать следующее:
- применение для маломощных двигателей;
- в двигателе присутствует шум и рывки;
- при использовании схемы симисторов на двигатель попадает постоянное U.
Этот тип регулятора устанавливается в вентиляторах, кондиционерах, стиральных машинах и электродрелях. Со своей задачей справляется хорошо, несмотря на недостатки.
Транзисторный тип
Другое название регулятора транзисторного типа – автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет значение U по принципу широтно-импульсной модуляции (ШИМ) с помощью выходного каскада на IGBT-транзисторах.
Переключение транзисторов происходит с высокой частотой, благодаря чему можно изменять ширину импульса. Следовательно, изменится и значение U. Чем длиннее импульс и короче пауза, тем выше значение U и наоборот. Положительные стороны использования этого варианта заключаются в следующем:
- Небольшой вес устройства при небольших габаритах.
- Достаточно низкая стоимость.
- Нет шума на низких оборотах.
- Контролируется низкими значениями U (0..12 В).
Главный недостаток приложения в том, что расстояние до электродвигателя не должно быть более 4 метров.
Регулирование за счет частоты
Широкое распространение получило регулирование скорости двигателей различных типов за счет частоты. Преобразование частоты занимает лидирующие позиции на рынке регуляторов скорости и устройств плавного пуска.
Благодаря своей универсальности можно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства используются для однофазных и трехфазных двигателей. Применяются следующие типы преобразователей частоты:
- Специализированная однофазная.
- Трехфазный без конденсатора.
Для регулирования скорости используется конденсатор, подключенный к обмоткам однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное сопротивление R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого преобразователя выполнен на IGBT-транзисторах.
Специализированный инвертор имеет свои преимущества и недостатки. Преимущества следующие:
- Управление артериальным давлением без вмешательства человека.
- Стабильность.
- Дополнительные функции.
Возможно управление работой электродвигателя при определенных условиях, а также защита от перегрузок и токов короткого замыкания. Кроме того, есть возможность расширить функционал за счет подключения цифровых датчиков, контроля рабочих параметров и использования ПИД-регулятора. К недостаткам можно отнести ограничения в частотном регулировании и достаточно высокую стоимость.
Для трехфазных АД применяют также частотные регуляторы (схема 4). Регулятор имеет на выходе три фазы для подключения электродвигателя.
Этот вариант также имеет свои сильные и слабые стороны. К первому относятся: низкая цена, выбор мощности, широкий диапазон частотного регулирования, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить самые главные: предварительная селекция и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобрести регулятор заводского типа, его можно собрать самостоятельно. Хотя регуляторы типа «tda1085» очень хорошо зарекомендовали себя. Для этого нужно подробно ознакомиться с теорией и приступить к практике.
Симисторные схемы очень популярны, особенно регулятор скорости асинхронного двигателя 220в (схема 5). Упрости. Он собран на симисторе VT138, который хорошо подходит для этих целей.
Этот регулятор также можно использовать для управления скоростью двигателя постоянного тока на 12 вольт, поскольку он довольно прост и универсален. Обороты регулируются изменением параметров Р1, определяющих фазу приходящего сигнала, открывающего переход на симистор.
Принцип работы прост. При запуске двигатель замедляется, индуктивность изменяется в меньшую сторону и способствует увеличению U в цепи «R2->P1->C2». При разрядке С2 симистор на некоторое время открывается.
Это другой порядок. Он работает немного по-другому: обеспечивая обратный энергетический привод, который является оптимально выгодным. В схему включен достаточно мощный тиристор.
Схема состоит из генератора управляющих сигналов, усилителя, тиристора и части схемы, выполняющей функции стабилизатора вращения ротора.
Наиболее универсальной схемой является симисторно-динисторный регулятор (схема 7). Он способен плавно снижать скорость вращения вала, реверсировать двигатель (менять направление вращения) и уменьшать пусковой ток.
Вот как работает схема:
- С1 заряжается на пробой U динистора D1 на R2.
- D1 при обрыве открывает переход на симистор D2, отвечающий за управление нагрузкой.
Напряжение нагрузки прямо пропорционально частотной составляющей открытия D2, которая зависит от R2. Система используется в пылесосах.
Он содержит универсальное электронное управление, а также возможность легкого подключения источника питания 380 В. Все детали должны быть размещены на печатной плате, изготовленной по технологии лазерного железа (ЛУТ). Подробности технологии изготовления этой платы можно найти в интернете.
Поэтому при выборе регулятора скорости электродвигателя есть возможность купить заводской или изготовить его самостоятельно. Сделать самодельный регулятор достаточно просто, так как если вы понимаете принцип работы устройства, то сможете легко его собрать. Кроме того, необходимо соблюдать правила безопасности при сборке деталей и при работе с электричеством.
Читайте также: Как усилить сигнал антенны: 3 лучших варианта подключения в домашних условиях
Как выбрать?
Конкретную модель регулятора скорости следует выбирать в соответствии с типом подключаемой электрической машины — коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с этим выбирается определенный преобразователь частоты.
Кроме того, для регулятора скорости необходимо выбрать:
- Тип управления — есть два способа: скалярный и векторный. Первый из них привязан к нагрузке на ось и проще, но менее надежен. Второй задается обратной связью от величины магнитного потока и действует как полная противоположность первому.
- Ток — следует выбирать не меньше или даже больше номинала подключаемого электродвигателя на максимальной скорости, желательно предусмотреть запас, особенно для электронных регуляторов.
- Номинальное напряжение — выбирается в соответствии с величиной разности потенциалов обмоток асинхронного или коллекторного двигателя. Если подключать электрическую машину к заводскому или самодельному регулятору, вероятно, будет именно такой номинал, если их несколько, то регулятор частоты должен иметь широкий диапазон напряжения.
- Диапазон скоростей – выбирается в соответствии с конкретным типом оборудования. Например, для вращения вентилятора достаточно от 500 до 1000 об/мин, а машине может понадобиться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте так, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если для регулятора скорости используется подходящая ниша или муфта, размеры подбираются в соответствии с количеством свободного места.
Подключение
Способ подключения регулятора оборотов двигателя зависит от его типа и принципа действия. Поэтому в качестве примера разберем один из самых распространенных регуляторов частоты, применяемых в самых разных областях.
Перед подключением обязательно прочтите заводскую схему подключения. Как правило, это можно увидеть на самом регуляторе скорости, либо в паспорте устройства:
Кроме того, с помощью распиновки можно определить количество контактов, которые будут использоваться для подключения контроллера мотора к сети. В нашем примере рассмотрим случай, когда используется трехпроводная система, а значит нужна фаза, нейтраль и земля. На задней панели регулятора эти два выхода AC и FG:
Затем нужно сверить цветовую маркировку разъема со схемой выше и сравнить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы избыточны, их можно укоротить, как показано на рисунке выше.
Простейший вариант
Самый простой способ изменить скорость двигателя постоянного тока. Они меняются простым изменением напряжения питания. И неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой.
В основном регулирование скорости осуществляется по цепи якоря. Также здесь возможно реостатное управление, если мощность двигателя небольшая, или имеется достаточно мощный реостат.
Это самый неэкономный вариант. Механические свойства двигателя с независимым возбуждением наиболее неблагоприятны из-за больших потерь, приводящих к падению механической мощности, КПД.
Другой возможностью является введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, мы увидим, что регулирование скорости вращения возможно только в сторону увеличения скорости. Это происходит из-за насыщения обмотки.
Поэтому реостатное регулирование скорости вращения устройства автономного возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа с таким включением будет периодической.
В цепи якоря
Это лучший способ управления скоростью двигателя с независимым возбуждением. Скорость вращения прямо пропорциональна приложенному к якорю напряжению. Механические свойства не меняют угол наклона, а движутся параллельно друг другу.
Для реализации этой схемы необходимо подключить цепь якоря к источнику напряжения, которое можно изменять.
Это возможно в электрических машинах малой или средней мощности. Рекомендуется подключать двигатель большой мощности к цепи с независимым генератором напряжения возбуждения.
В качестве привода генератора используется обычный трехфазный асинхронник. Для снижения скорости достаточно понизить напряжение на якоре. Меняется от номинального в меньшую сторону. Такая схема называется «мотор-генератор». Это позволяет изменять параметры двигателя 220v.
Для низкого напряжения
Управление 12-вольтовыми устройствами проще из-за более низкого напряжения и, как следствие, более доступных частей. Вариантов таких расстановок множество, поэтому важно понимать сам принцип.
Такой мотор имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, по ним идет управление скоростью. Питание может быть 12, 24, 36в или другое. Что нужно, так это изменить его. Лучше, когда вы находитесь в диапазоне от нуля до максимума. В более простых вариантах 12-0в не подойдет, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы методом поверхностного монтажа, кто-то собирает печатную плату — это уже зависит от желания и возможностей каждого человека.
Этот вариант подходит, если точность не важна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально изменяется крутящий момент.
Другой вариант — со стабилизацией скорости вне зависимости от нагрузки на ось.
Питание 12 вольт, схема очень простая. Мотор плавно набирает обороты, а также плавно их тормозит, так как выходное напряжение колеблется в пределах 12-0В. В результате крутящий момент может быть снижен практически до нуля.
Если потенциометр поворачивается в противоположном направлении, двигатель также постепенно набирает скорость до максимальной. Микросхема очень распространена, так же подробно описаны ее характеристики. Еда 12-18 лет.
Есть еще вариант, только это уже не на 12, а на питание 24в.
Двигатель постоянного тока, питание — переменное, так как это диодный мост. При желании можно отказаться от моста и запитать его константой от своего блока питания.
От сети
Однофазные двигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие двигатели есть на электродрелях, электролобзиках и других инструментах. Для уменьшения или увеличения скорости достаточно, как и в предыдущих случаях, изменить напряжение питания. Для этой цели тоже есть решения.
Конструкция подключается напрямую к сети. Регулирующим элементом является симистор, которым управляет динистор. Симистор размещен на радиаторе, максимальная мощность нагрузки 600 Вт.
Если есть подходящий ЛАТР, можно все это сделать с его помощью.
Двухфазный двигатель
Устройство, имеющее две обмотки — пусковую и рабочую, в принципе двухфазное. В отличие от трехфазного имеет возможность изменять скорость вращения ротора. Характеристика вращающегося магнитного поля не круговая, а эллиптическая, что обусловлено конструкцией.
Есть две возможности управления скоростью:
- Изменение амплитуды питающего напряжения (Uy),
- Фаза — изменение емкости конденсатора.
Такие устройства широко используются в быту и на работе.
Обычные асинхронники
Трехфазные электрические машины, несмотря на простоту эксплуатации, имеют ряд особенностей, которые необходимо учитывать. Если просто изменить напряжение питания, момент будет меняться в небольших пределах, но не более. Для регулирования скорости на большой площади необходимо достаточно сложное оборудование, которое просто сложно и дорого в сборке и настройке.
Для этого в промышленности налажен выпуск преобразователей частоты, позволяющих изменять скорость вращения электродвигателя в нужном диапазоне.
Асинхронный двигатель набирает обороты по параметрам, установленным на преобразователе частоты, которые можно изменять в широких пределах. Инвертор – лучшее решение для таких двигателей.
Выбираем устройство
Для выбора эффективного регулятора необходимо учитывать характеристики устройства, функции назначения.
- Для коллекторных двигателей распространены векторные контроллеры, но скалярные более надежны.
- Важным критерием выбора является мощность. Он должен соответствовать тому, что разрешено на используемом устройстве. А лучше превысить для безопасной работы системы.
- Напряжение должно находиться в допустимых широких пределах.
- Основное назначение регулятора — преобразование частоты, поэтому этот аспект необходимо выбирать в соответствии с техническими требованиями.
- Также нужно знать срок службы, габариты, количество входов.
Прибор триак
Симистерное (триаковое) устройство используется для управления освещением, мощностью нагревательных элементов и скоростью вращения.
Схема симисторного контроллера содержит минимум деталей, показанных на рисунке, где С1 — конденсатор, R1 — первый резистор, R2 — второй резистор.
С помощью преобразователя эффект регулируется изменением времени открытого симистора. Если он замкнут, конденсатор заряжается от нагрузки и резисторов. Один резистор контролирует величину тока, а другой регулирует скорость зарядки.
Когда конденсатор достигает предела напряжения 12В или 24В, ключ активируется. Симистер переходит в открытое состояние. Когда сетевое напряжение переходит через ноль, симистор запирается, тогда конденсатор дает отрицательный заряд.
Преобразователи на электронных ключах
Тиристорные регуляторы мощности одни из самых распространенных, с простой схемой работы.
Тиристорный, работает в сети переменного тока.
Отдельным типом являются стабилизаторы переменного напряжения. Стабилизатор содержит трансформатор с несколькими обмотками.
Схема стабилизатора постоянного тока
Заряжает 24 вольта на тиристоре
Принцип работы заключается в зарядке конденсатора и запертого тиристора, а когда конденсатор достигает напряжения, тиристор подает ток в нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Рассмотрим подробнее микросхему.
Показанная выше микросхема TDA 1085 обеспечивает управление двигателем с обратной связью 12 В, 24 В без потери мощности. Обязательно наличие тахометра, обеспечивающего обратную связь от двигателя к приборной панели.
Сигнал от стаходатчика поступает на микросхему, которая передает силовым элементам задачу — добавить напряжение на двигатель. Когда ось нагружена, руль добавляет натяжение, и мощность увеличивается. Освобождение вала снижает напряжение. Обороты будут постоянными, а крутящий момент не изменится. Частота контролируется на большой площади. Такой мотор на 12, 24 вольта устанавливают в стиральные машины.
Своими руками можно сделать устройство для измельчителя, токарный станок по дереву, болгарку, бетономешалку, соломорезку, газонокосилку, дровокол и многое другое.
Промышленные регуляторы, состоящие из контроллеров на 12, 24 вольта, залиты смолой, поэтому ремонту не подлежат. Поэтому блок на 12в часто изготавливают самостоятельно. Простая альтернатива с использованием микросхемы U2008B. Контроллер использует обратную связь по току или плавный пуск. При использовании последнего необходимы элементы С1, R4, перемычка Х1 не требуется, при обратной связи наоборот.
При монтаже регулятора выберите правильное сопротивление. Так как при большом сопротивлении может быть рывок на старте, а при малом сопротивлении компенсация будет недостаточной.
Важно! При регулировке регулятора мощности помните, что все части устройства подключены к сети, поэтому необходимо соблюдать технику безопасности!
Регуляторы скорости для однофазных и трехфазных двигателей 24, 12 вольт – это функциональное и ценное устройство, как в быту, так и в промышленности.
Измерения
Ясно, что число оборотов должно быть каким-то образом определено. Для этого используются тахометры. Они показывают количество оборотов в данный момент. Обычным мультиметром скорость измерить невозможно, разве что в автомобиле.
Как видите, на электрических машинах можно изменять различные параметры, подстраивая их под нужды производства и хозяйства.